


|
|||||||||
 |
 |
 |
 |
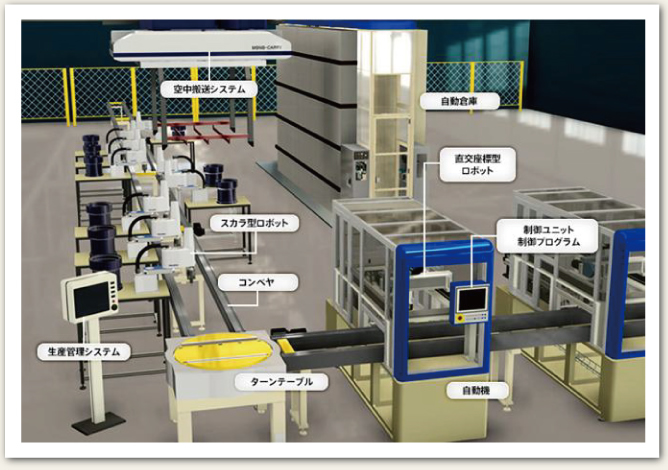
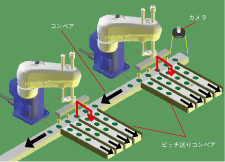
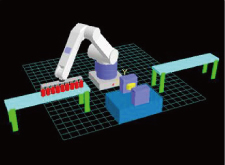
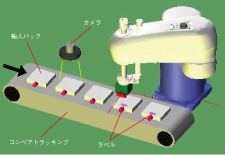
ワークを供給し、カメラでワーク位置を検出します。ロボットで後工程の搬送部へピッキングを行います。ワーク複数混在も可能です。認識しなかったワークはスルーしてリターンする機構を設けることでリトライさせます。 |
 |
 |
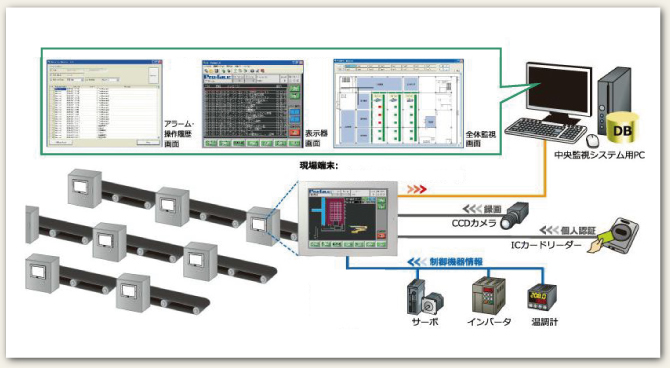
表示器が取得する各種情報をパソコンで監視し、装置の停止要因が特定できるので、操作ミスの防止、故障の早期復旧、生産性の向上を実現します。 |
 |
 |
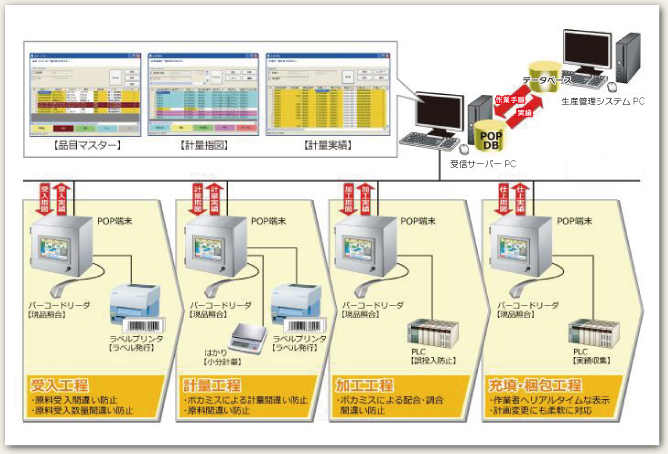
作業手順を指示し、その実績を管理することによりミスがあった時の追跡調査を容易にします。 |
 |


|
|
|||||||||||||||||||||
|
|
|||||||||||||||||||||
|
|
|||||||||||||||||||||
|
|
|||||||||||||||||||||
|
||||||||||||
| ※資料提供:DENSO様 | ||||||||||||
